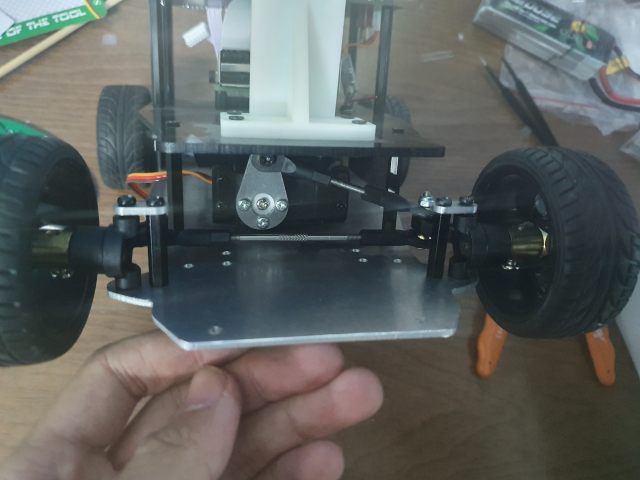
用于计算舵机转向小车前轮转向控制模型的计算
舵机转向小车运动参数解算
编码器每轮783计数
轮子周长 0.2m
编码器计时周期 30ms
编码器长度换算 编码器值/4000 m
编码器速度换算 编码器值/4000/0.03 m/s
后轮轴长0.16m
前后轮差0.19m
1.后轮电子差速
后轮两个轮子分别使用两个编码器电机 通过pid算法可以精确的控制电机转速
车模在转弯时 两个后轮走过的路程不一致 因此需要差速控制 一般汽车上有专业的机械差速器控制差速
差速算法以后再补
2.前轮角度控制
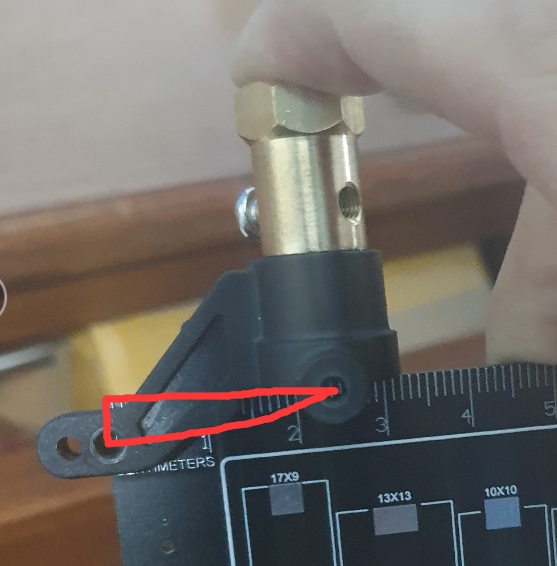
对于一些车模来说 前轮是有一个舵机带动 而舵机的角度又是会和前轮偏转角度呈一个复杂关系 有的车模控制程序简单的用一个线性关系去解算 会导致误差较大 对舵机连杆进行建模 然后通过运动学求解析解就可以得到一个良好的控制模型式
这是我们的控制模型 一般来说 分为以下两种 先考虑第二种

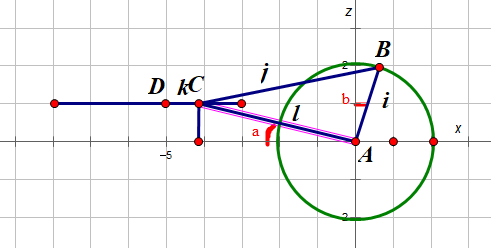
控制原理
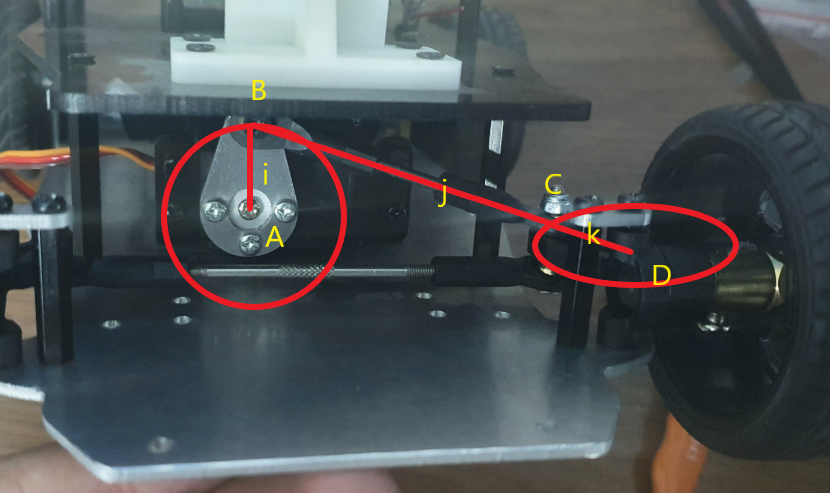
二维绘图
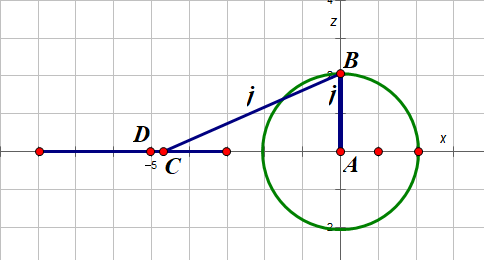
此处AB=i 图画i/j不清楚 此处绘制$z_C=z_D=0$实际也可不为零(见下文)
其中 圆A和圆D的位置确定 圆心和半径可以测量出来 j的长度确定
因此 B和C满足距离公式
$$
(x_B-x_C)^2+(y_B-y_C)^2+(z_B-z_C)^2=j^2①
$$
同时 B和C分别满足圆的公式
$$
x_B^2+z_B^2=i^2②\
y_A=y_B=0(坐标原点设定在A上)\
(x_C-x_D)^2+(y_C-y_D)^2=k^2③\
z_C=z_D
$$
将①展开 分别减去②和③ 并带入已知条件 可得下式
$$
z_D^2-2x_Bx_C-2z_Bz_C-x_D^2-y_D^2+2x_Cx_D+2y_Cy_D=j^2-k^2-i^2\
2x_Bx_C+2z_Bz_C=i^2-j^2+k^2-x_D^2-y_D^2+z_D^2+2x_Cx_D+2y_Cy_D
$$
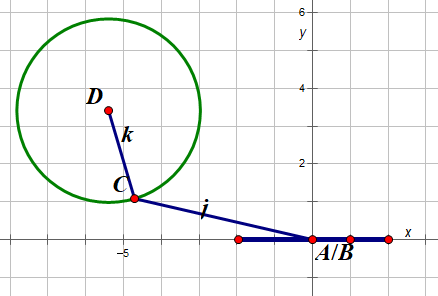
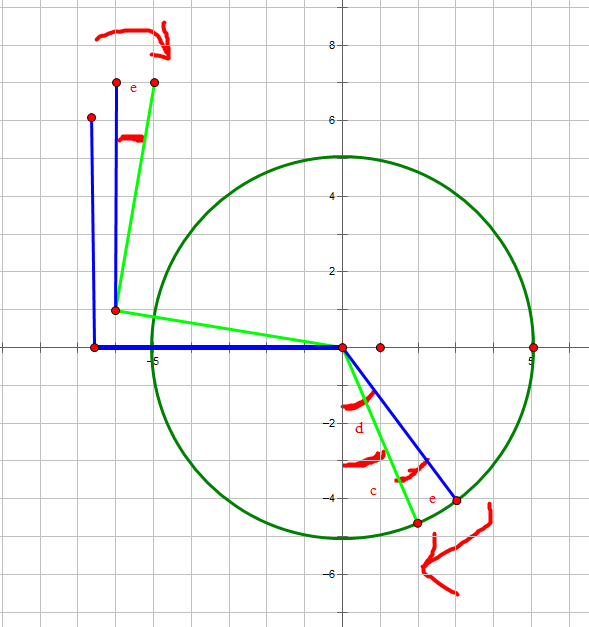
如下图做辅助线(2021年12月2日记 此处有误 投影后BC不为j)
$$
x_C=-l\cos(a)\
z_C=l\sin(a)\
l=\sqrt{x_C^2+z_C^2}\
x_B=i\sin(b)\
z_B=i\cos(b)
$$
带入上式
$$
2il\sin(a)\cos(b)-2il\cos(a)\sin(b)=i^2-j^2+k^2-x_D^2-y_D^2+z_D^2+2x_Cx_D+2y_Cy_D\
\sin(a-b)=\frac{i^2-j^2+k^2-x_D^2-y_D^2+z_D^2+2x_Cx_D+2y_Cy_D}{2il}\
b=a-\arcsin(\frac{i^2-j^2+k^2-x_D^2-y_D^2+z_D^2+2x_Cx_D+2y_Cy_D}{2il})
$$
其中
$$
x_C=x_D+k\sin(c)\
y_C=y_D-k\cos(c)\
z_C=z_D\
a=\arctan(z_C/x_C)\
d-e=c
$$
e是轮子的偏转角
d是轮子偏转角为0时 k与y轴负半轴的夹角 是结构自带的角度
算法
爷烦了 不写了 直接贴代码
1 | # -*- coding: utf-8 -*- |
运行结果
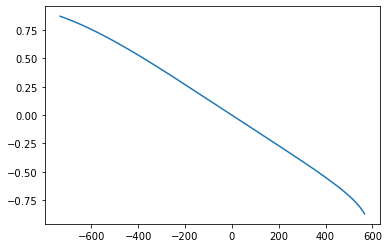
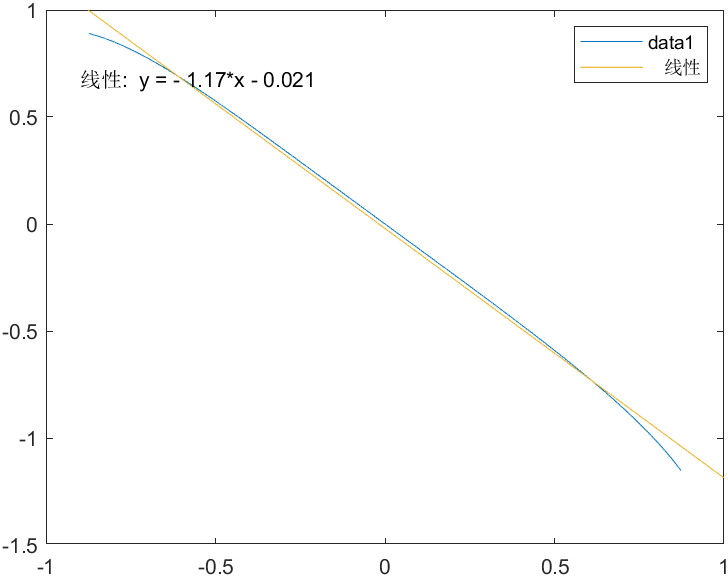
在中间很长一段都有非常好的线性近似 直接做个线性就行
以上只考虑了舵机直连轴(左前轮)的运动状况 如果要求转向半径 可以参考阿克曼转向相关内容